

Bài báo của các tác giả Raphaël Richert, Alexis Goujat, Laurent Venet, Gilbert Viguie, Stéphane Viennot, Philip Robinson, Jean-Christophe Farges, Michel Fages, and Maxime Ducret
Để khắc phục những khó khăn của các kĩ thuật ghi dấu truyền thống, ghi dấu với máy quét trong miệng và công nghệ CAD/CAM đã được phát triển để phục vụ cho thực hành nha khoa. Thập kỉ gần đây nhất đã chứng kiến sự tăng lên về số lượng của các thiết bị quang học quét trong miệng, và các thiết bị này dựa trên các công nghệ khác nhau; lựa chọn công nghệ nào có thể ảnh hưởng tới quá trình sử dụng trên lâm sàng. Nhằm cho phép giới thiệu trước khi mua hoặc tái đầu tư một máy quét trong miệng, bài báo này trước tiên tổng hợp lại các công nghệ đang được sử dụng (chiếu sáng, định lượng khoảng cách vật thể và tái tạo). Phần thứ hai tập trung thảo luận các vấn đề lâm sàng như thao tác, đường cong học tập, phủ bột, trình tự quét, theo dõi vật thể, và chất lượng mô hình số hóa. Phần cuối cùng dành để bàn luận về sự chính xác của dữ liệu cũng như mối tương quan hai hàm khi được ghi dấu kĩ thuật số do sự kết xuất dữ liệu trong giao diện người dùng thường bị hiểu sai. Tổng quan này đưa ra kết luận rằng các thế hệ máy quét trong miệng hiện nay phù hợp với thực hành lâm sàng nói chung, mặc dù vẫn tồn tại khác biệt giữa các công nghệ được sử dụng. Một khía cạnh quan trọng được nhấn mạnh trong bài đánh giá này là sự cắt giảm về khối lượng phần cứng, dẫn tới gia tăng tầm quan trọng của các công nghệ dựa trên phần mềm.
- Giới thiệu
Từ thế kỉ 18, các kĩ thuật lấy dấu truyền thống đã được sử dụng để ghi lại hình dạng ba chiều của mô răng. Tuy nhiên, sự thay đổi thể tích của vật liệu lấy dấu và giãn nở của thạch cao dễ gây ra các sai lệch, và do đó qui trình yêu cầu chất lượng labo rất cao [1-3]. Để khắc phục các khó khăn này, ghi dấu với máy quét trong miệng đã được phát triển cho thực hành nha khoa [4]. Việc ứng dụng các thiết bị quét trong miệng vào thực hành nha khoa trùng khớp với sự phát triển của công nghệ CAD/CAM trong nha khoa, với vô vàn ưu điểm cho các bác sĩ. Giờ đây, máy quét trong miệng và CAD/CAM cung cấp giải pháp để lập kế hoạch điều trị dễ dàng hơn, bệnh nhân dễ chấp nhận điều trị hơn, giao tiếp với labo, giảm thời gian phẫu thuật, giảm yêu cầu kho chứa, và giảm thời gian điều trị [5-7]. Thập kỉ gần nhất chứng kiến sự tăng lên về số lượng của các thiết bị quét trong miệng sử dụng quang học, và các thiết bị này dựa trên các công nghệ khác nhau; lựa chọn công nghệ nào có thể tác động tới việc sử dụng trên lâm sàng [6].
Để cho phép bác sĩ đưa ra lựa chọn trước khi mua mới hoặc tái đầu tư máy quét trong miệng, bài báo này được chia thành ba phần. Phần đầu tiên trình bày các công nghệ khác nhau được sử dụng trong các máy quét trong miệng hiện tại để ghi lại hình ảnh và tái lập lại dữ liệu số hóa bằng phần mềm. Phần thứ hai dành riêng cho các khó khăn thường gặp trên lâm sàng với các công nghệ trên trong quá trình sử dụng máy quét trong miệng. Phần cuối cùng báo cáo về độ chính xác của các công nghệ đang sử dụng hiện nay.
- Các công nghệ quét trong miệng
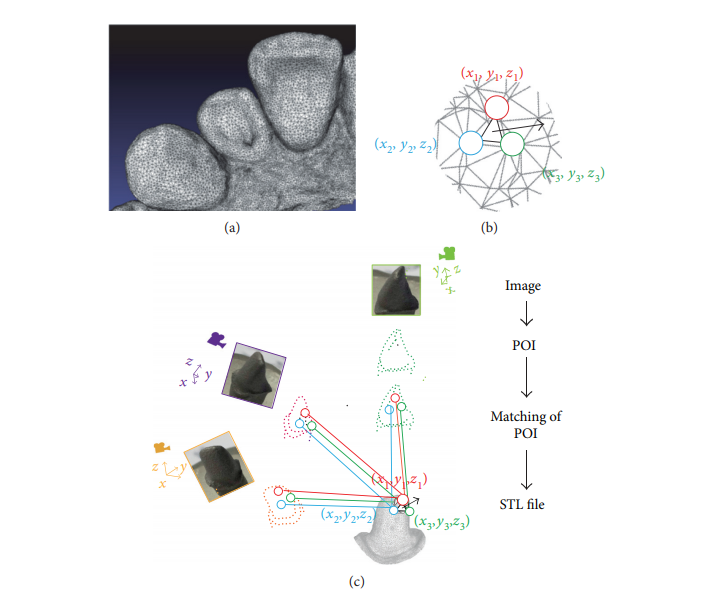
Máy quét trong miệng là một thiết bị y tế bao gồm một camera cầm tay (phần cứng), một máy tính và một phần mềm. Mục đích của máy quét trong miệng là ghi lại một cách chính xác hình thể ba chiều không gian của một vật thể. Định dạng kĩ thuật số được sử dụng rộng rãi nhất là STL mở (Standard Tessellation Language – Ngôn ngữ chuẩn mực/ Ngôn ngữ tam giác chuẩn) hoặc dạng STL khóa (Hình 1(a)). Định dạng này đã được sử dụng trong rất nhiều các lĩnh vực công nghiệp và nó mô tả các cấu trúc cấu thành từ các bề mặt tam giác, trong đó mỗi tam giác được định nghĩa bởi ba điểm và một mặt phẳng bình thường (Hình 1(b)). Tuy nhiên, các định dạng dữ liệu khác cũng đã đang được phát triển để ghi lại màu sắc, độ trong suốt, hoặc kết cấu bề mặt của mô răng (ví dụ như Định dạng dữ liệu đa giác – Polygon File Format, PLY). Không phân biệt giữa các loại công nghệ hình ảnh sử dụng bởi máy quét trong miệng, tất cả camera cần nguồn chiếu sáng và sau đó ghi lại các hình ảnh đơn lẻ hoặc video và tổng hợp lại bởi phần mềm sau khi nhận diện các điểm quan tâm (POI – points of interest). Hai trục đầu tiên (x và y) của mỗi điểm được đánh giá trên hình ảnh và trục thứ ba (z) sau đó được tính toán dựa trên công nghệ đo khoảng cách tới vật thể của mỗi camera, được giải thích bên dưới (Hình 1(c)).
- Chiếu sáng và ghi hình (Light Projection and Capture). Trong lĩnh vực tái tạo ba chiều, có một ranh giới rõ ràng giữa kĩ thuật chủ động và thụ động. Các kĩ thuật thụ động chỉ sử dụng ánh sáng của môi trường xung quanh để chiếu sáng mô trong miệng và phụ thuộc ở một mức độ nhất định vào kết cấu bề mặt của một vật thể. Các kĩ thuật chủ động sử dụng các ánh sáng màu trắng, đỏ hoặc xanh chiếu từ camera và vật thể do đó ít phụ thuộc vào kết cấu bề mặt thực tế của cũng như màu sắc mô để tái tạo hình ảnh ba chiều [8, 9]. Trong kĩ thuật chủ động, một điểm chiếu sáng được rọi vào vật thể và khoảng cách tới vật thể đó được đo bằng kĩ thuật tam giác (qui trình được giải thích sau) (Hình 2(a)). Một cách thay thế khác là chiếu sáng theo các hình thái, ví dụ như chiếu sáng dạng dải hay dạng lưới (Hình 2(b) và 2(c)) [10]. Sự tái lập bề mặt có thể đạt được bằng cách tổng hợp lại các hình ảnh, video có thể chụp nhiều tấm hình một giây trong một luồng dữ liệu liên tục, hoặc phân tích mỗi sóng [11, 12].
- Công nghệ Khoảng cách tới vật thể (Distance to Object Technologies)
- Kĩ thuật tam giác (Triangulation). Kĩ thuật tam giác dựa trên nguyên tắc vị trí của một đỉnh của tam giác (ở đây là vật thể) có thể tính toán được nếu biết vị trí và góc của điểm quan sát còn lại (Hình 3(a)). Hai điểm này có thể được tạo ra bởi hai cảm iến, một cảm biến đơn lẻ sử dụng một lăng kính hoặc ghi lại hai điểm đồng thời.

HÌNH 2 Bản chất của ánh sáng. (a) Chiếu sáng điểm. (b) Chiếu sáng dạng lưới. (c) Chiếu sáng dạng lưới bởi máy quét trong miệng 
HÌNH 3: Xác định khoảng cách tới vật thể. (a) Kĩ thuật Tam giác: khoảng cách BC có thể được xác định theo công thức BC = AC × sin  /sin ( + Ĉ). (b) Kĩ thuật tiêu điểm: khoảng cách tới vật thể được xác định theo tiêu cự. (c) Kĩ thuật Lấy mẫu mặt sóng chủ động cần một camera và một khẩu độ lệch trục xoay tròn quanh trục quang học và tạo ra hình ảnh xoay của các điểm quan tâm. (d) Chụp ảnh lập thể là công nghệ tạo ra hình ảnh ba chiều bằng thuật toán phân tích nhiều ảnh. - Kĩ thuật tiêu điểm (Confocal). Là kĩ thuật dựa trên dựa trên việc thu thập hình ảnh sắc nét hay mờ từ một vị trí nhất định (Hình 3(b)). Công nghệ này có thể phát hiện vùng nét của một bức ảnh để tính ra được khoảng cách của vật tương ứng với tiêu cự của ống kính. Hình ảnh một răng do đó có thể được tái lập bằng các hình ảnh được chụp liên tiếp tại các khoảng lấy nét, khẩu độ và các góc khác nhau quanh chủ thể [12]. Vùng nét liên quan trực tiếp tới sự khéo léo của người thao tác do người đó có thể vô tình tạo ra các vùng mờ do chuyển động [13], và kĩ thuật này cũng cần một hệ thống quang học lớn, gây khó khăn khi áp dụng trên thực hành lâm sàng.
- Kĩ thuật Lấy mẫu mặt sóng chủ động (AWS – Active Wavefront Sampling). AWS là một kĩ thuật ghi hình bề mặt, yêu cầu một camera và một module khẩu độ lệch trục. Module này sẽ di chuyển thành hình tròn xung quanh trục quang học và tạo ra một vùng xoay của vùng quan tâm (POI) (Hình 3(c)). Thông tin về khoảng cách và độ sâu sau đó được thu nhận và tính toán từ mẫu vẽ ra bởi mỗi điểm [8].
- Kĩ thuật chụp ảnh lập thể (Stereophotogrammetry). Chụp ảnh lập thể ước đoán tất cả các trục (x,y và z) chỉ thông qua thuật toán phân tích hình ảnh [14] (Hình 3(d)). Do phương pháp này dựa trên nguồn sáng thụ động và phần mềm hơn là nguồn sáng chủ động và phần cứng, camera tương đối nhỏ, dễ thao tác và giá thành rẻ hơn.
- Kĩ thuật tam giác (Triangulation). Kĩ thuật tam giác dựa trên nguyên tắc vị trí của một đỉnh của tam giác (ở đây là vật thể) có thể tính toán được nếu biết vị trí và góc của điểm quan sát còn lại (Hình 3(a)). Hai điểm này có thể được tạo ra bởi hai cảm iến, một cảm biến đơn lẻ sử dụng một lăng kính hoặc ghi lại hai điểm đồng thời.


- Các công nghệ tái lập hình ảnh. Một trong những thách thức chính trong việc xuất ra hình mẫu ba chiều số hóa là sự đồng nhất của vùng quan tâm (POI) thu thập dưới các góc độ khác nhau. Khoảng cách giữa các hình ảnh có thể được tính toán sử dụng một gia tốc kế tích hợp vào camera, nhưng độ tương tự thường được sử dụng hơn để quyết định góc nhìn của hình ảnh. Sử dụng thuật toán, độ tương tự xác định vùng quan tâm trùng khớp trên các hình ảnh khác nhau [2]. Những vùng quan tâm này có thể được tìm thấy bằng cách phát hiện các vùng chuyển tiếp, như những đường cong mạnh, đường giới hạn, hoặc sự khác biệt trong thang xám (“Dựng hình từ bóng”/”Shape from Silhouette”) [15]. Một ma trận biến đổi sau đó được tính toán để đánh giá độ tương tự giữa tất cả hình ảnh như xoay hay đồng dạng. Những điểm cực trị có thể được loại bỏ bằng thống kê để giảm nhiễu. Mỗi trục (x,y và z) được trích xuất từ ma trận phép chiếu (projection matrix), và dữ liệu được tạo ra.
Theo dõi Phần 2 series bài viết tại: http://wp.me/p6QuDW-dN